

新闻资讯



十沣科技CTO丁桦教授:“明日地平线”破局机器人“卡脖子”难题
从力学所的实验室到机器人研发的前沿阵地,丁桦教授的研究始终围绕一个核心:用自主可控的技术破解工程难题。Demain Horizon平台的发布,不仅填补了我国人形机器人全流程仿真工具的空白,更构建了一套可复用的技术体系。正如丁桦所言:“工业软件的突破没有捷径,需要从基础算法到生态建设的长期投入。”在这条自主创新之路上,以京沣科技为代表的中国企业,正以扎实的技术积累,为全球机器人产业贡献“中国方案”。

8月9日,在2025世界机器人大会“具身智能技术与应用论坛”上,北京京沣科技有限公司联合北京人形机器人创新中心发布Demain Horizon(明日地平线)平台。这款整合了设计、仿真、优化与训练功能的一体化平台,被视作我国人形机器人研发工具的突破,和破解该领域潜在的“卡脖子”风险的突破。
作为京沣科技总经理、深圳十沣科技CTO,丁桦教授深耕结构力学与数值仿真领域数十年,从中科院力学所的博士后到工业软件企业的技术掌舵人,他的学术轨迹与我国自主工业软件的发展脉络紧密交织。论坛期间,丁桦教授就平台研发初衷、技术突破及行业痛点等问题接受了《中国科技信息》的专访。
从国家工程到人形机器人
跨领域创新的底层逻辑
中国科技信息:您早年在中科院力学所从事博士后研究,长期深耕固体力学领域,是什么机缘让您将研究重心转向人形机器人方向?
丁桦:这其实是学科交叉与产业需求共同推动的结果。科研要服务国家需求。1987年我进入中科院力学所做博士后,当时主要研究固体力学理论与数值方法,尤其在冲击动力学、工程结构分析、动力减缩算法等方面积累了大量经验。2009年,我参与广州中国科学院工业技术研究院CAE中心工程结构中心的建设运行,开始转向工业应用研发服务,在智能制造、装备性能分析、船舶与海洋工程、岛礁建设等方面为企业解决了一系列的关键技术问题,其中包括众多的中小企业和国内、国际的知名企业,如东方电气、龙穴造船、中广核、欧洲空客、旭化成等。
在海洋工程领域,我们处理过大量复杂结构的动力学问题,比如南海岛礁建设中的快速施工工艺、海洋牧场的结构优化,这些研究本质上都是关于多体系统的运动控制与载荷分析。而人形机器人作为典型的多链多体系统,其关节驱动、刚柔耦合等问题,与海洋工程中的结构动力学分析存在共通的底层逻辑。
2021年我加入十沣科技后,我们注意到人形机器人研发中存在工具链“断链”与物理仿真失真两大技术痛点:第一,现有工具分散,设计、仿真、训练各环节使用零散工具,数据无法互通,且核心仿真工具依赖国外平台。企业需在多个软件间切换,数据无法互通,导致开发效率低下。我们调研发现,企业将仿真模型迁移到实体机器人时,一般需要大量的参数调整,严重影响研发效率。第二,国外物理引擎存在局限。例如对机器人至关重要的闭环结构、柔性部件等,主流引擎需等效简化处理,使得仿真结果大幅偏离真实场景。
更关键的是,工业软件自主化是刚需。在力学所工作期间,我们就为在冲击动力学方面的仿真需求开发了替代美国LS-Dyna的显式动力学软件SimuDyn。目前在机器人开发中,也经历类似国防软件被“卡脖子”的问题,和软件功能受限等问题。仿真工具链高度依赖英伟达等国外平台,若遭国外禁用或部分先进模块的禁用,中国机器人研发可能陷入停滞。十沣科技与北京人形机器人创新中心联合成立京沣科技,目标就是打造中国人自己的机器人开发“工具箱”。
Demain Horizon 平台
构建全流程自主化工具箱
中国科技信息:您认为当前人形机器人研究面临的主要问题集中在哪些方面?
丁桦:当前的主要问题主要体现在三个层面。首先是核心仿真工具的依赖,目前行业主流的机器人训练仿真平台多由国外企业主导,比如英伟达的相关工具链,存在断供“卡脖子”风险。
其次是技术链条的碎片化。机器人研发涉及CAD设计、CAE仿真、强化学习训练等多个环节,现有工具来自不同供应商,数据格式不兼容,导致“设计-仿真-实机”流程断裂,严重影响研发效率。
最后是基础理论的转化瓶颈。人形机器人在复杂环境中的泛化能力、刚柔耦合系统的精确建模等问题,需要多物理场耦合、分布式AI等跨学科技术支撑。而国内在这些基础理论的工程化应用上,还存在明显短板。
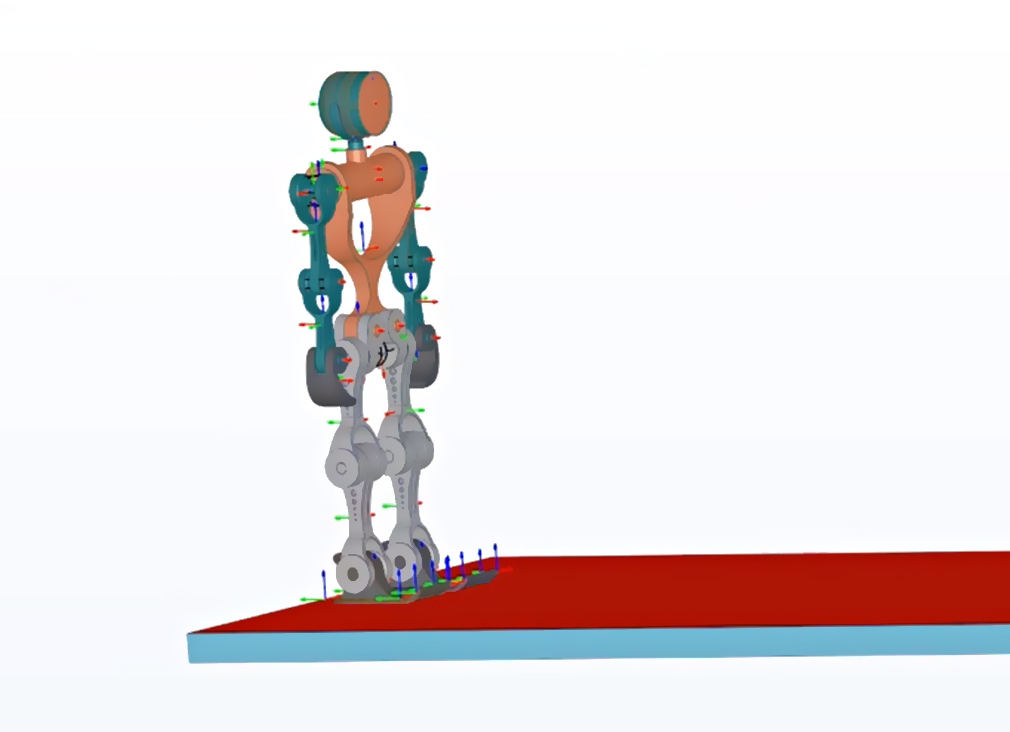
举个具体例子,传统仿真工具对含闭环结构的多体系统处理能力不足,往往需要简化模型,导致仿真结果与实物偏差过大,在迁移到实体机器人时成功率低,需要大量的调整。而我们在Demain Horizon平台中研发的多体动力学求解器,能直接高效高精度地处理机器人中的闭环结构和刚柔耦合问题,无需过度简化,这就是从基础理论层面突破国外技术壁垒的体现。
中国科技信息:Demain Horizon平台被称为“中国自主的工具箱”,它核心解决问题能力有哪些?
丁桦:Demain Horizon的核心使命是构建"设计-仿真-训练-部署"的全流程自主化能力,具体体现在三个维度。
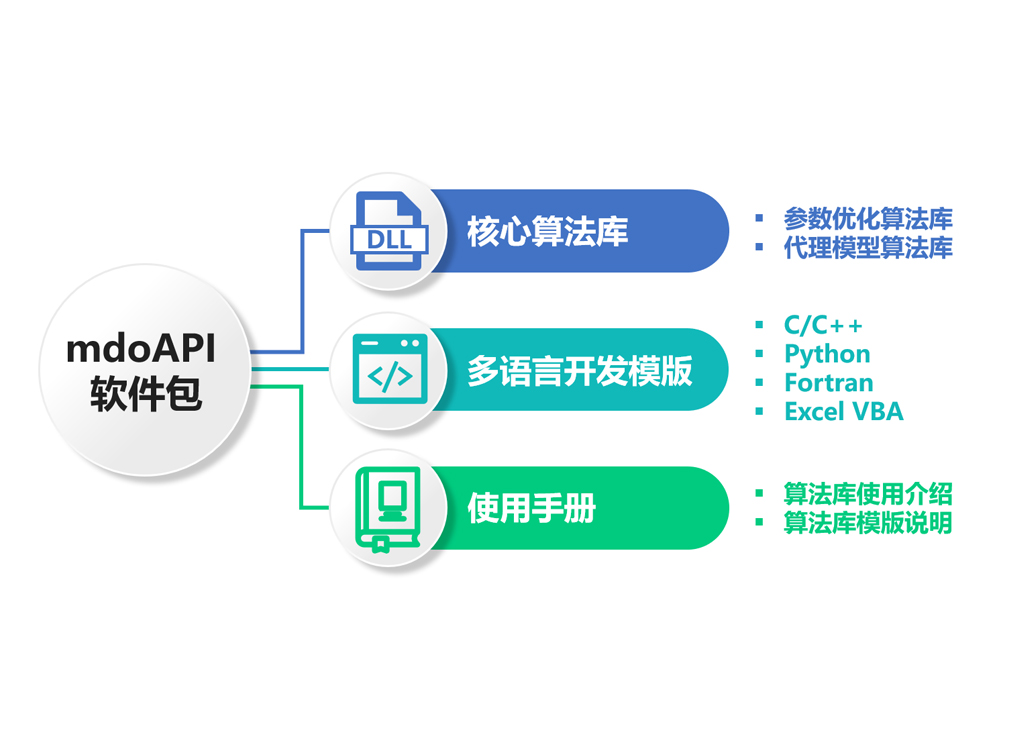
第一,工具链整合,将设计软件、多物理场仿真(结构/流体/控制)、强化学习训练系统集成于统一平台,实现数据无缝流转,解决“流程断链”问题。平台整合了CAD设计、CAE仿真、强化学习训练模块,支持从3D模型到控制代码的一键生成。基于统一数据格式和操作界面,支持离线设计等,打破数据壁垒,满足上下游设计、优化、评估的需求。
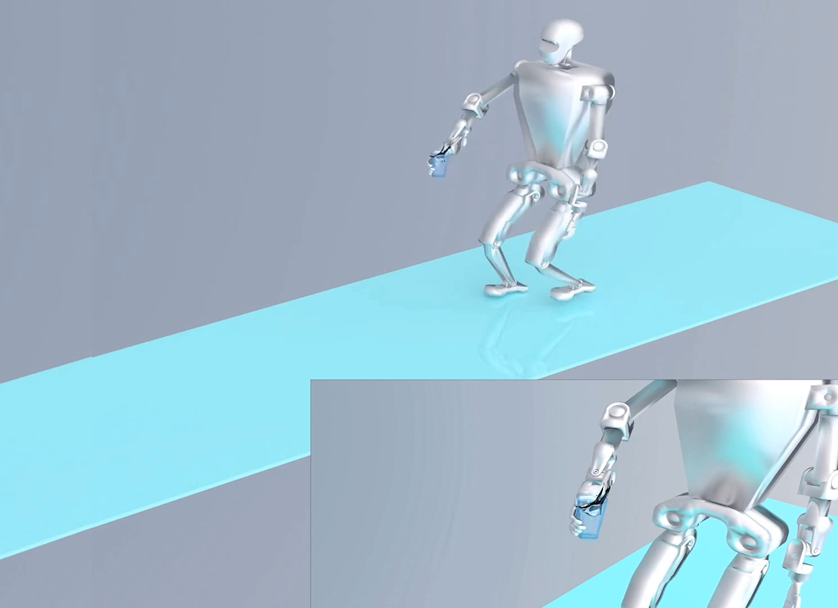
第二,物理引擎突破。独创的动态子结构法,可将结构自由度降低3个数量级,求解速度提升,同时支持刚柔耦合仿真。平台搭载了我们自主研发的多物理场耦合引擎,能精准模拟沙地、碎石地、端水行走时等复杂环境下的机器人运动。
第三,现代化软件架构。采用总线式热插拔架构,各模块可独立开发、灵活替换。内嵌友好训练开发环境,支持Python语言,满足个性化研究,可定制优化算法。
柔性设计:
让机器人更接近 "生命体"
中国科技信息:除了平台本身,您团队在对人形机器人部件柔性化等技术上有何设想,这一技术如何让机器人更像人?
丁桦:我认为柔性设计是未来机器人部件高效、高可靠性要求的关键一环。传统机器人采用刚性结构设计,虽然控制简单,但存在一些不可回避的问题,如关节驱动力大,我们的仿真数据显示,刚性足机器人的踝关节峰值驱动力可达柔性足的2倍以上;环境适应性差,在不平地面易打滑等。这些因素将导致较低的能量利用率、结构可靠性、系统稳定性等。
柔性设计带来三大进化:
一个是动作更拟人,刚性手抓握物体时,控制误差易导致物品损伤,如捏碎鸡蛋,工艺品等;柔性结构则像“手指贴橡胶”,通过形变缓冲实现精准握力操作。这种柔性特性能提升操作安全性,如柔性手指可通过形变分散压力。
第二是环境适应性更强。沙漠、碎石等复杂地形中,柔性足通过自适应形变分散压力,避免刚性足易陷坑、打滑的问题。
第三个是寿命与能效突破。马拉松机器人需中途更换电池,但人类依靠肌腱柔性储能的特性可高效续航。柔性关节通过降低电机功率输出,显著提升耐久性。以柔性足为例,我们采用弹性结构,仿真对比显示,搭载柔性足的机器人在保持平稳步态的情况下,踝关节驱动力峰值降低50%以上,电机寿命延长2倍,续航时间提升40%。
从本质上说,柔性设计不是简单的材料替换,而是通过仿真技术实现“结构——控制——环境”的动态匹配。就像人类行走时,脚踝、膝盖的自然形变会缓冲地面冲击,机器人的柔性关节也在做类似的事情——这正是具身智能的核心要义:让机器真正适应物理世界的复杂性。
以上文章来源于中国科技信息,作者陈克然 彭泺
最新资讯